![Приглашаем на GRAND DRIVE PARTY 2024]()
Приглашаем на GRAND DRIVE PARTY 2024
23.11.24
0
6455

Ученые создали новые синтетические мягкие мышцы для реалистичных роботов
Группа исследователей из Школы инженерии и прикладных наук Колумбийского университета разработала новый тип синтетических мягких мышц, производить которые можно с помощью технологии 3D-печати. Материал получился очень прочным и способен выдерживать вес в 1000 раз превосходящий его собственный, а предел его энергии упругой деформации (растяжения) в 15 раз выше в сравнении с тканями настоящих мышц.
Материал не требует использования внешнего источника для управления давлением, что часто встречается в других существующих решениях, которые полагаются на энергию пневматической или гидравлической инфляции (надува). Эти компоненты, как правило, занимают много места, что делает их неудобными в использовании при создании машин, где важна компактность и независимость.
Основой синтетических мышц служит силиконовый каучук, имеющий пористую структуру с заполнением этанолом. Материал приводится в работу с помощью электрического тока малой мощности, передаваемого по очень тонким проводам с высоким сопротивлением.
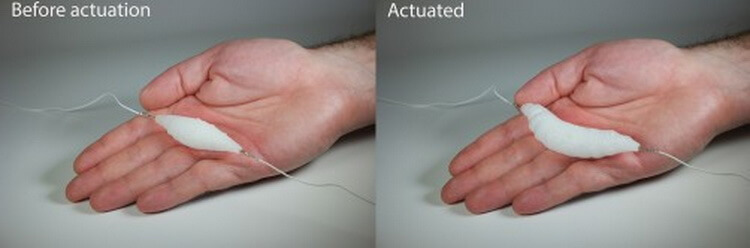
Синтетическая мышца перед и после приведения в действие
«Мы достигли определенного прогресса в создании цифрового мозга для роботов, но вот их тела по-прежнему остаются на примитивном уровне», — прокомментировал Ход Липсон, профессор механической инженерии, возглавляющий проект.
«Это большая часть общего пазла, и, как и в биологии, разработанные синтетические мышцы могут принимать и изменять форму тысячью различных способов. Мы начинаем преодолевать одно из последних препятствий, не позволявших создавать реалистичных роботов».
Новые синтетические мышцы могут принести большую пользу в сфере разработки и производства так называемых «мягких» роботов. За последние годы наблюдается огромный прогресс в создании машин, наделенных возможностью выполнять множество тонких поставленных задач. Тем не менее остается еще множество действий, выполнять которые твердые роботы не могут.
Действия, связанные с захватом объектов и манипуляцией ими, требуют наличия некоторого уровня ловкости и гибкости, обеспечить который нынешние технологии не в состоянии. Новые же материалы, подобные тому, о котором идет речь в данной статье, позволят создавать роботов, способных манипулировать мягкими и маленькими объектами, не нанося им каких-либо повреждений.
Машины, использующие подобные технологии, смогут обеспечивать надежную помощь человеку в работе в ситуациях, где требуются деликатные действия, например, в медицине. Вполне возможно, что подобные материалы начнут использоваться уже в протезах нового поколения, которые смогут обеспечить уровень контроля гораздо выше, чем обеспечивают нынешние протезы.
Сейчас же ученые из Колумбийского университета планируют усовершенствовать синтетические мышцы и заменить использующиеся провода высокого сопротивления на высокопроводящие материалы, чтобы увеличить скорость и эффективность отклика мышц.